A Quick Start Guide to Underwater ROVs. In this guide, you’ll learn about what defines a remotely operated vehicle, different types of ROVs, and what they are used for. Underwater ROVs are used to observe and interact underwater across various industries.
Ready? Let’s go. This is ‘ROVs 101’
What does ROV stand for?
‘ROV’ stands for Remotely Operated Vehicle and almost always refers to an underwater ROV vehicle.
This article will teach you quickly and effectively about:
- Different types of ROVs
- The components of an underwater ROV
- Who uses ROVs and what they use them for
Other excellent articles have been written that focus on small underwater ROVs used for visual inspection; this article will be broader and capture the wider use of ROVs across various industries. It will finish with the latest design trends in underwater ROV technology and provide a starting point to continue learning about advanced ROV applications in the related article “Use of underwater ROVs and manipulator’s arms.”
What is an underwater ROV?
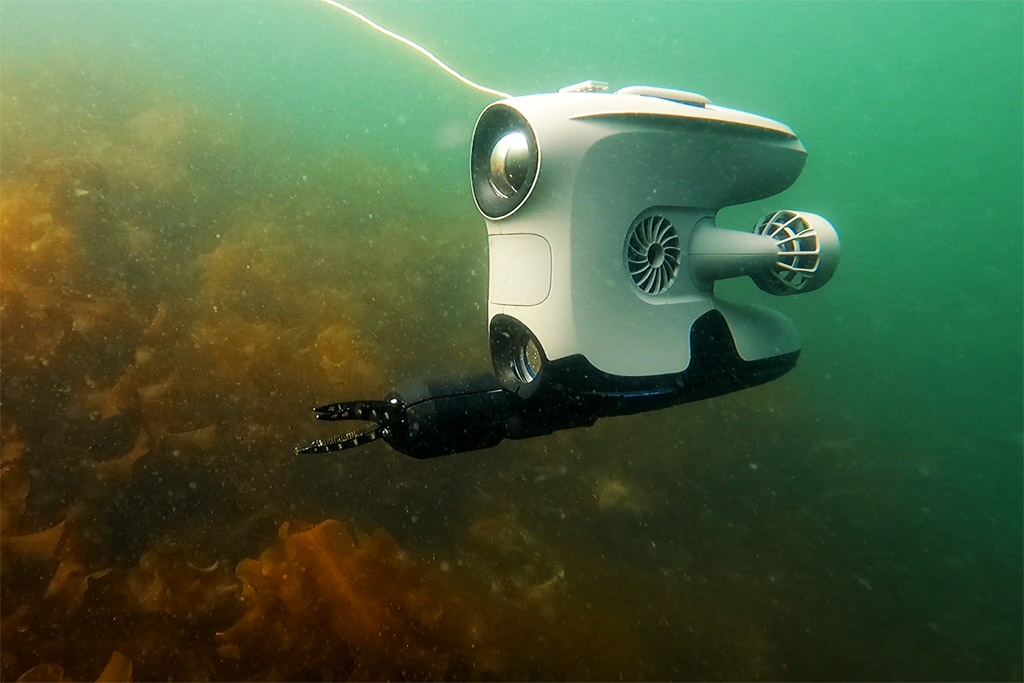
An underwater ROV is a robotic vehicle that can go anywhere from the water surface to full ocean depth and is used to observe and complete tasks by the ROV user. You can usually spot an ROV because of its design: they have multiple propeller thrusters pointing in various directions and are prismatic in shape, as opposed to torpedo form (although there are exceptions). This configuration of thrusters means that the underwater ROV can be controlled to stay in a fixed position (‘station keeping’), allowing it to visually inspect or carry out work using its manipulator arm and other tools. Underwater ROVs will also have a tether (an electrical cable) that connects them to the surface or wherever the control station is located.
ROV vs AUV vs UUV?
You may come across the terms AUV and UUV.
‘AUV’ stands for Autonomous Underwater Vehicle and is generally in a torpedo form and doesn’t have a tether (although there are exceptions).
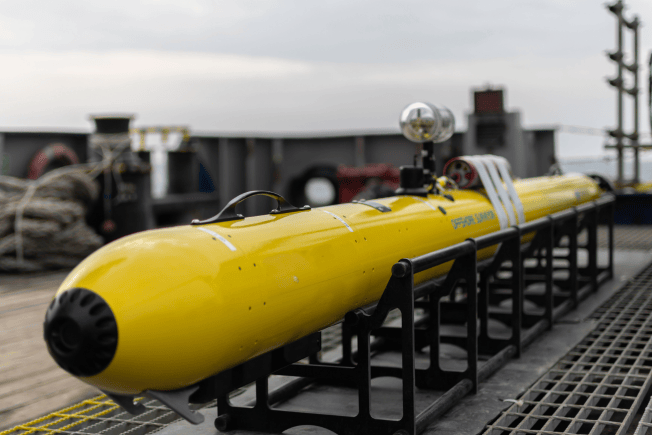
‘UUV’ stands for Unmanned Underwater Vehicle and is the collective term for any underwater drone or underwater robot, including underwater ROVs and AUVs.
Different Types of ROVs
In the ROV world, the vehicles are usually broken into size categories, which also correspond with capability. The terminology can vary amongst industries and operators, but generally, the following categories are used to define the range in size. The different classes or types of ROVs are:
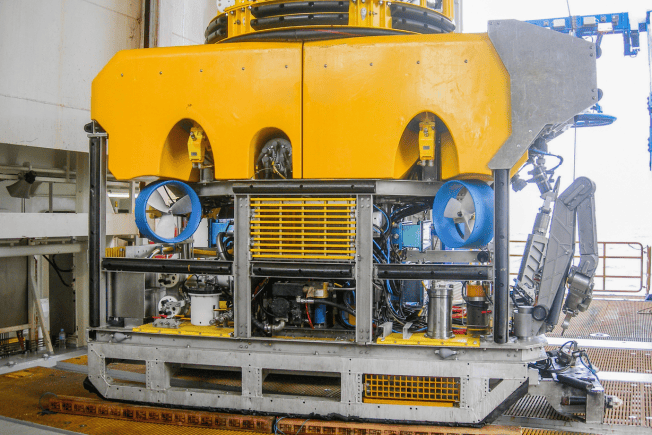
Work Class ROV
These ROVs are the size of a mini-bus and weigh a few thousand kilograms (1kg = 2.2lb). Pioneered by the US Navy in the 1960s, they subsequently became the workhorse of the offshore energy industry through the 1970s and onwards. They require a large surface vessel, a Launch and Recovery System (LARS) to deploy, and multiple highly skilled operators to work the various sensors, controls, and large manipulator arms on the vehicle. They are the only vehicles that can carry the largest robotic arms (up to 2m/7ft in length) which are used to manipulate tools to install, repair, control, maintain, and recover offshore infrastructure including subsea manifolds, blowout preventers, and various rig installations.
Light Work Class ROV
As the name suggests, these are slightly smaller ROVs that weigh a few hundred kilograms and are the size of a large quad bike. They require a LARS but can be deployed from smaller vessels. Whilst less powerful than their big brothers, they can still carry out ‘light’ intervention work. Light Work Class ROVs are generally used by operators who don’t need all the capabilities of the largest ROVs but still need to use manipulators to grab hefty objects or hold mid-size tooling.
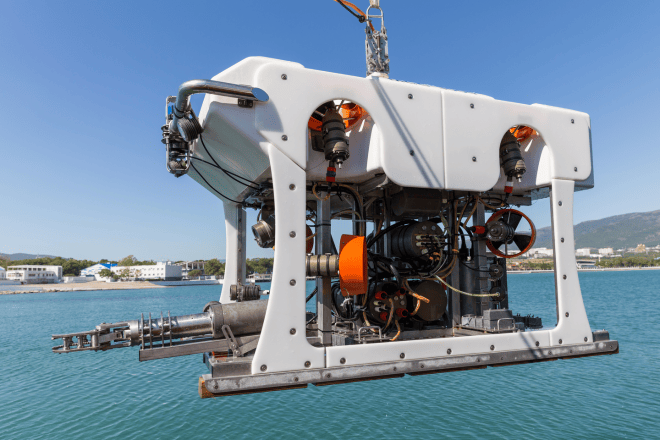
Inspection (or Observation) ROV
These ROVs are the size of your lounge chair, weigh around 100kg (220lb), and can be deployed from much smaller surface vessels than work-class vehicles. In some cases, they can be deployed with just two operators from a jetty or small boat, although some Inspection-class ROVs still require a LARS. Due to their smaller size and technology limitations, they have generally been used for visual inspections and ‘simple’ work using more basic robotic arms than work-class vehicles. The ‘inspection’ and ‘observation’ monikers reveal the history of a time when these were the smallest vehicles available and were used anytime a user just needed ‘eyes on, rather than an intervention capability. Technology advances have allowed design companies to close this capability gap by manufacturing more advanced, dexterous manipulator arms for inspection-class ROVs, which can also be used for light intervention work.

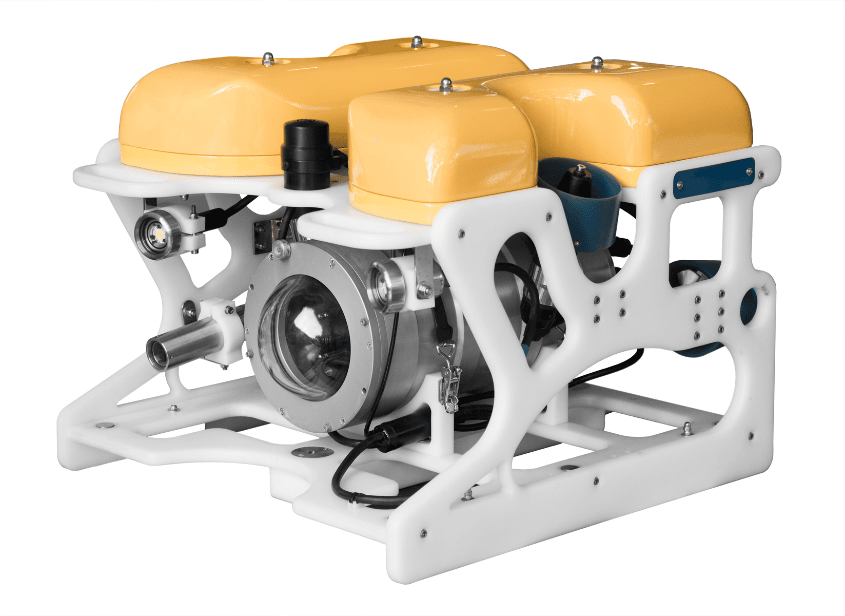
Mini or Micro ROV (Portable)
These ROVs weigh less than 50kg (110lb) and can therefore be deployed and recovered by one or two people. The last two decades have seen a huge influx of manufacturers releasing Portable Class ROVs, driving pricing lower and making underwater inspection more accessible to the everyday user. These systems are generally used as eyeball vehicles for visual inspection or, at most, a simple grabber manipulator arm for picking things up off a lake bed or seafloor. Recently, with the release of very compact, dexterous manipulator systems, operators are pushing the boundaries of remote intervention using this smallest class of underwater vehicle for NDT and other applications usually reserved for larger vehicles. Portable ROVs are quickly becoming the most prevalent class of vehicles for ‘quick and routine’ hull inspections and infrastructure inspections.
Main Components of an ROV
The design of an ROV is made up of a few core components and can be fitted with a range of add-ons to upgrade capability. This is a general list and exceptions can of course occur.
Core Components
Frame
The central chassis of the ROV. Similar to a motor vehicle, the frame of the ROV will fundamentally define the vehicle in terms of its size, what it can carry, and through-frame lift capacity.
Thrusters
The driving force of the ROV, there is usually between 5-8 of these on the vehicle enabling forward, back, lateral, and vertical movement. Many modern vehicles, especially in the portable class, have thrusters arranged in an orientation that enables the vehicle’s roll, pitch, and yaw.
Cameras
ROV Cameras are the primary way a human operator can control the vehicle and see what is going on. Larger vehicles will have multiple cameras, especially in the work class category. An ROV can get extra vision through a boom-mounted or manipulator-mounted underwater camera.

Lights
ROV lights are usually added at multiple points on the vehicle to illuminate the workspace and enable light work or inspection activities. Multiple lights enable redundancy should one light be compromised.

Power Source
There are two main ways that an ROV is powered: onboard power or topside power. Topside power means the power is supplied from the topside vessel or control station and has the advantage that the vehicle does not need to carry heavy lithium batteries and is also not limited by battery life. On the other hand, topside power supplies need to have certain safety measures in place to protect any nearby human diver. If battery life allows, battery-powered ROVs can be advantageous for routine inspections due to their minimal topside design footprint.
Topside Controller
The means for controlling the vehicle. This can take a number of forms depending on the size of the vehicle. It can range from very small handheld controllers and user interface the size of a smartphone or could be a control room on a vessel or on land with multiple monitors and hand controllers. For larger vehicles, there will generally be two operators, one controlling the vehicle and one controlling the manipulator arms or other tooling. The control setup may include a master controller to provide precision control and intuitive ergonomics for operating the manipulator.
Tether
The cable connecting the ROV to the topside controller providing power and communication. This cable can be either a collection of copper twisted pairs or fiber optic cable.
Auxiliary Connections (sometimes)
To enable external add-ons, some vehicles will have multiple auxiliary ports for serial or ethernet connections. In some cases, additional multiplexer hardware may be available from ROV manufacturers to expand capability. A multiplexer allows for multiple tools and sensors to be connected through the one ROV port on serial or ethernet protocols.
Add-Ons Components Of An ROV
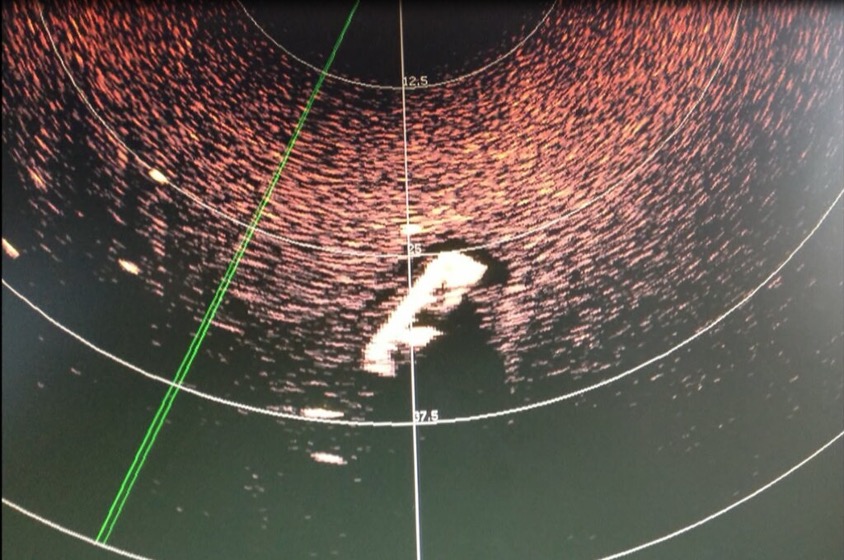
Multibeam Sonar
Underwater conditions often render a visual camera ineffective due to sediment turbidity or low ambient light at deeper depths. Sonar uses sound waves to build a picture of the environment to enable navigation and identification.
Doppler Velocity Logger (DVL)
A Doppler Velocity Log (DVL) uses sound waves to estimate the ROV velocity relative to the sea bottom. By logging this over time, along with the heading angle of the ROV, the vehicle’s position can be tracked.
USBL
If possible, an Ultrashort Baseline system can be mounted to an ROV to provide another means of measuring position, relative to an external reference beacon (usually on the seafloor or a surface vessel).
Grippers, Manipulators, and other Tooling
The underwater manipulator or gripper is the ROV’s way of ‘doing’ something underwater beyond just observing. Manipulator arms can range from small grabbers the size of cucumber to large Work Class manipulators with over 2m (7ft) of reach and lifting 200kg (440lb). The more advanced manipulators can be used to conduct very complex tasks underwater, such as turning valves, tying knots, or placing instruments and tools in precise positions.
NDT instruments and additional sensors
Sensors like Ultrasonic Thickness (UT) and Cathodic Protection (CP) probes are used on the ROV (or integrated with the manipulator tooling) to conduct Non-Destructive Testing (NDT) of underwater infrastructure.
What are ROVs used for? And who uses them?
ROVs are used when diving is impractical and dangerous for humans while working or investigating submerged hazards in the deep water. ROVs carry video cameras, lights, and robotic arms to grab things. ROVs help humans safely study the ocean by going to places where humans cannot go.
ROVs are used prolifically across a number of industries for observation, inspection, and intervention tasks. Here are the main industries that use these systems along with a list of their main commercial applications.
For a more in-depth look at inspection and intervention tasks using manipulator’s arms, see our article on ‘Top uses for underwater manipulators‘.
| Industry | Top ROV Applications |
| Offshore Energy (Wing, Oil and Gas, Hydroelectric) |
General Visual Inspection Close Visual Inspections (looking closely at the condition of underwater infrastructure) NDT Inspections Infrastructure Deployment and Recovery Control Manifold Interventions |
| Military | Submarine Rescue Waterborne Improvised Explosive Device (WIED) Intervention Sea and Limpet Mine Intervention Special Recovery Operations (e.g. Downed Aircraft Recovery) Naval Asset Inspections Hydrography |
| Oceanography and Marine Science | Coral and Marine Life Observation Sample and Sediment Collection Academic Research Applications |
| Inshore Infrastructure (Tanks, Dams, and Waterways) |
Condition Assessment and Monitoring Sediment Sampling Removal of Sludge by Dredging Debris Collection |
| Search and Rescue | Drowned Victim Recovery Forensic Assessment Equipment Recovery Large Scale Search and Documentation |
| Commercial Diving and Salvage | Attaching and releasing hooks for equipment installation and recovery Construction and salvage tasks (such as cutting and welding) |
| Aquaculture | Equipment and infrastructure monitoring Rope management and recovery Net Repair Mort Retrieval Cleaning |
| Nuclear Decommissioning | Fuel Rod Management Debris Collection and Removal General Visual Inspection Cutting and Recovery NDT Inspections |
| Underwater Exploration | General Visual Observation Retrieval of Objects |
What’s next in ROV technology?
Human+ Capability with a Small Deployment Footprint
One goal of ROV technology development is to gradually reduce the risk to commercial and military divers by achieving and exceeding human-level capability. In more dangerous tasks, like Limpet Mine intervention, an ideal solution would be for small-ish ROVs to be able to conduct the tasks usually reserved for humans, whilst the diver observes from a distance or remotely.
With the performance (strength, size, dexterity, and intelligence) of underwater robotic arms steadily increasing, it is now possible to capture some of this work. High-end militaries and commercial companies are exploring using dexterous manipulators on smaller portable and inspection class vehicles. With a smaller vehicle, the deployment of the system is more economical and expedient and, in some scenarios, essential for the task at hand (such as in confined spaces unfit for Work Class ROVs)

Whilst portable and inspection class ROVs are usually always electric, Work Class ROVs have usually always been hydraulic. This is because historically it was not possible to achieve high power thrusters and manipulators with electric technology; furthermore, the design of most subsea infrastructure was designed around the need for hydraulic fluid intervention. In recent decades, there has been a push to increasingly move to electric-based technology where possible including in the construction of Work Class ROVs. There now exist a number of electric work-class vehicles and whilst strength superiority is still owned by hydraulic systems, the gap is closing.
Resident ROVs
Another key development in ROV technology is the so-called Resident ROV concept. This is the ability to have an ROV remain underwater for long periods of time, deploying from an underwater garage when required and then returning to that garage when not in use. This has large advantages in not requiring a surface vessel to be on station to deploy the vehicle, therefore, reducing costs and enabling longer-term ROV work. Additionally, the response time to deploy an ROV to inspect or intervene is far shorter.
Over-the-horizon ROV Control
Advances in satellite communication technology have enabled the development of remote operation concepts where an Unmanned Surface Vessel (USV) and ROV can be deployed whilst being remotely controlled by operators on land. This concept has large implications for ROV service providers being able to keep operators onshore, improving operator lifestyle and minimizing costs.
(Feedback on this article including corrections and additions can be sent to info@reachrobotics.com)


