Experience intuitive control and superior accuracy with this imitative operator-centred controller.
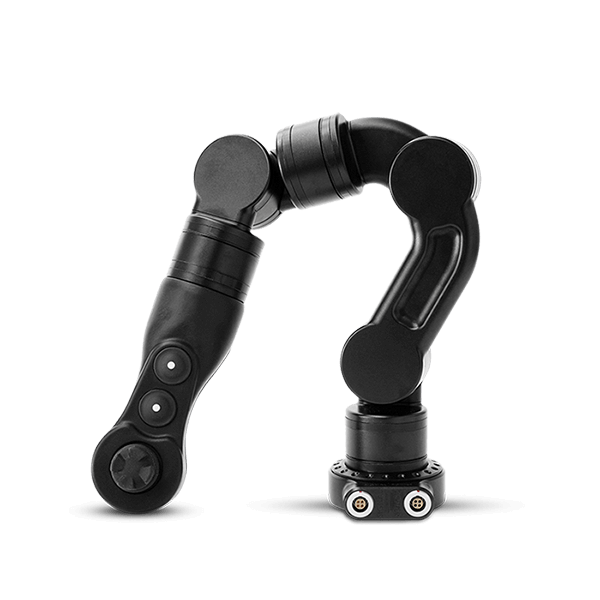
MASTER ARM CONTROLLER
Approach Complex Tasks with Confidence
With one-to-one joint matching and comfortable design, the Master Arm controller reduces ROV operator training time and enables dexterous tasks not possible with traditional control methods. Available in 7 and 5-Function models to suit your manipulator, increase accuracy and precision with this plug-and-play upgrade.
This Master Arm controller is designed with 5 degrees of freedom to suit manipulators up to
5-functions. Compatible with both Alpha and Bravo series, Master Arm controllers increase
accuracy and precision when completing complex underwater tasks.
Key Specifications
Weight: 500g
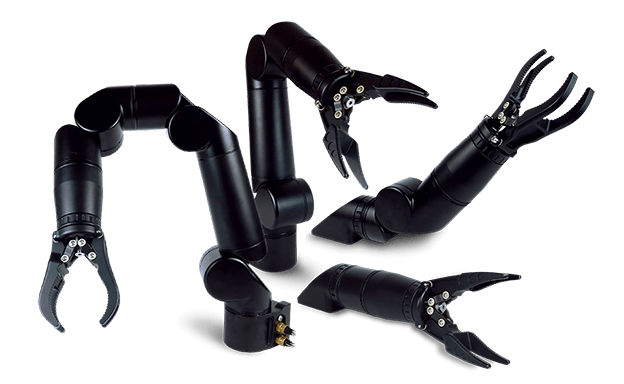
Place and recover objects with unmatched dexterity and minimised workload.
This Master Arm controller is designed with 7 degrees of freedom to suit manipulators up to
7-functions. Compatible with both Alpha and Bravo series, Master Arm controllers increase
accuracy and precision when completing complex underwater tasks.
Key Specifications
Weight: 670g
Precise placement of probes for crack and corrosion monitoring.
Reach confined surfaces and complex area unreachable with lower degree-of-freedom manipulators and traditional control methods.
Visit Undersea Defence Technology 2024 to see our advanced subsea manipulators in action. Meet our team & discover our robotic capabilities for defence and critical forces.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}